

















Refund Policy
From the day you start receiving the product , 30-day no-questions-asked refund policy on all products.
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.

The PiCar-V is an open source robot learning kit based on Raspberry Pi. Equipped with a wide-angle USB webcam, it is powerful together with three whole new circuit boards and less but simpler wiring. (Compatible with RPi 4B/3B/3B+, Raspberry Pi is NOT included)
Some constructure plates in a well-designed structure, solid, durable and shatterproof. Complete code suitable for almost all platforms to control the car.
Python code is provided for the car, and you can also program and debug it with Dragit, a Snap-based graphical interface, by just simple dragging and dropping the code blocks for complex functions.
There are many ways to control the robot remotely: with the app on PC (works on any OS), you can control the car and the cam's direction on the UI and view the image it takes in real time; or, with the related code, realize the same functions on a web browser, means it can works with any mobile phones, tablets, etc.


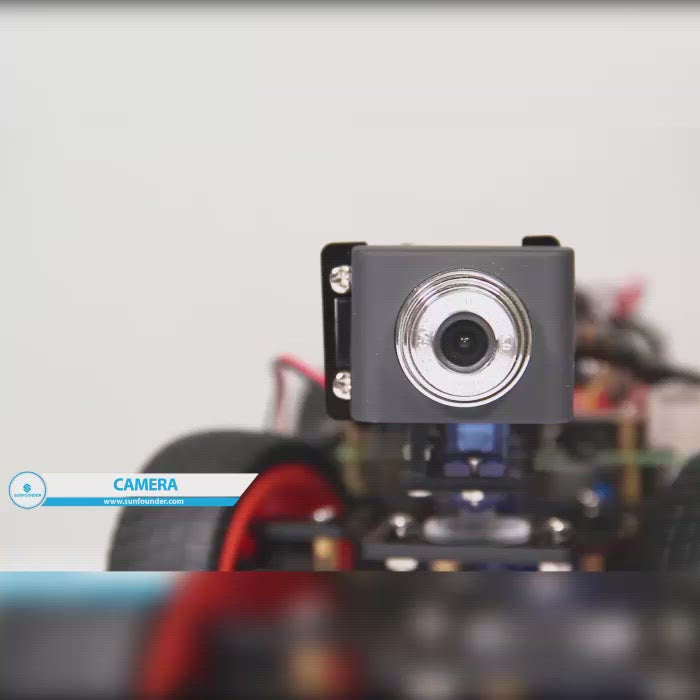
Equipped with the Wide Angle 120° USB camera, which provides a wide and clear vision, you can view image and video taken in a web browser on your device by wifi in real-time.The 2-axis pan-and-tilt servos enable the camera to film in a range of a hemisphere,for you to easily control the angle of filming video and image, the image transmission is in high efficiency, which makes image transmit in real-time.

Python code is provided for the car, and you can also program and debug it with Dragit. A visual programming language software is provided for easy coding. Even if you don't have programming basis, by means of easy code blocks complex functions can also be realized.

Examples given to expand your knowledge. In addition to using the keyboard to control the status of the car, we also wrote a ball tracking code. After the code runs, find a red ball (at least larger than the diameter of the camera) and put it within 10-50 cm range in front of the camera to get the car to follow your ball.
With the app on PC (works on any OS), you can control the car and the cam's direction on the UI and view the image it takes in real time; or with the related code, realize the same functions on a web browser, means it can works with any mobile phones, tablets, etc.

NOTE: The 18650 batteries are not included.